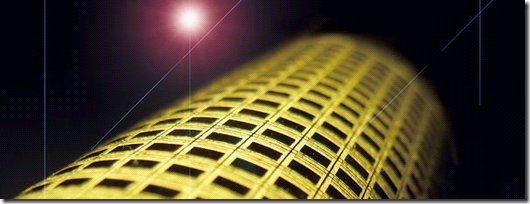
电子皮肤:上图是用纳米线活性矩阵电路建造的电子皮肤的光学图像。每个黑方块表示一个感应单元。美国加里福尼亚大学伯克利分校Ali Javey 和 Kuniharu Takei提供。
人的皮肤都有良好触觉功能,你甚至都能感觉到苍蝇轻轻地趴在皮肤上的压力。然而,假肢并没有这种能力,机器人也离获得灵敏的触觉功能有相当的距离。
现在,美国加里福尼亚州有二个研究小组宣称,他们发明了由微小电路制成的有灵敏压力触觉(压感)的人造皮肤。这两种皮肤既可以改善假肢功能也可用于提高机器人的能力。
斯坦福大学研究人员基于有机晶体管制造的人造皮肤,其灵敏度是人皮肤的1000多倍。它在二个平行的电极之间夹有一层弹性橡胶,任何轻微的触动,即使是翩翩飞舞的蝴蝶停留的瞬间,它都可以感觉到。

据美国斯坦福大学的新闻稿报道,人造皮肤的工作原理就像弹簧。橡胶层贮存有电荷,受到压力时电荷总量改变。电极能感觉到电荷的变化并将皮肤“感觉”到的压力大小传递出去。
美国加里福尼亚大学伯克利分校的研究人员开发出的另一种人造皮肤,工作原理与前者相类似,但采用的是无机纳米线电路。
研究人员制造“电子皮肤”时首先把纳米线印入18乘19单元的方块矩阵中,大小约2.7平方英寸。然后把纳米线晶体管连接到导电橡胶层,一旦遇到外力电阻大小则会改变。研究人员说,可以按比例制作成更大的材料。
加里福尼亚大学伯克利分校研究人员说,电子皮肤可探测到0—15千帕的压力,其范围从打字到手握物体所需的力。它可以帮助机器人调节抓握物体时的用力大小,轻可握住易碎的鸡蛋重可握紧沉重的烤盘。
据英国广播公司公报(BBC notes)介绍,这二种电子皮肤都能在十分之一秒时间内觉察压力的存在。这个数字超过人皮肤的反应速度。这就意味着,我们未来的假肢和机器人(如flapjack-flipping robots)将会更灵活敏捷。

0
推荐
 京公网安备 11010502034662号
京公网安备 11010502034662号