 跑步有多难?其实没多难,无非就是保持平衡罢了。适应两足行走的我们在会走路之后不久就会学会了跑步,要不了多少时间,这种活动就自然得完全不用思考,多出的余裕足以用来想些其他的事情。例如,《当我跑步时我谈些什么》。
跑步有多难?其实没多难,无非就是保持平衡罢了。适应两足行走的我们在会走路之后不久就会学会了跑步,要不了多少时间,这种活动就自然得完全不用思考,多出的余裕足以用来想些其他的事情。例如,《当我跑步时我谈些什么》。
机器人却没有这么好运。虽然他们往往代表了人类设计和制造的最高水准,但是在跑步这项简单的运动上,却总是力不从芯。在两足机器人身上,处理器会一直忙于处理来自传感器的信息和控制电动机的转速,绝对没有空闲时间来琢磨如何写一本畅销书。但纵然如此,机器人还是跑不好。
这可能是因为它们跑步的方式不对。人类跑步时是通过控制肌肉来改变肢体位置,而机器人却是通过控制关节的转动,来让腿部弯曲和伸展,再通过各种各样的传感器探测身体状态,反复调节身体平衡。一点都不好看。
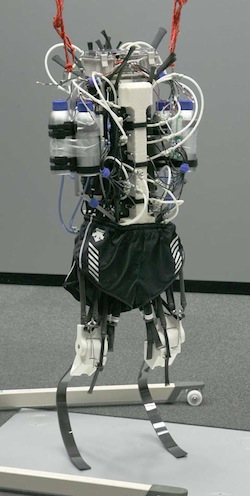
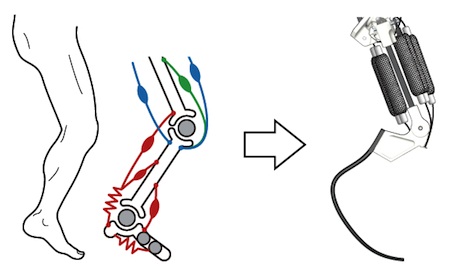
而让机器人跑得像人,是个很重要的课题。这将会让两足机器人提升运动速度,而获得的经验能够帮助制造行为方式更像人的机器。东京大学的博士后新山龙马(Ryuma Niiyama)打算改变机器人跑步的方式。从仿生学的角度出发,他为机器人添置了几条人造气动肌肉——这些肌肉更像是橡胶管,外面附有一层坚硬的外壳。当充气时,人造肌肉就会拉长,而吸气时就会缩短,就像是真正的肌肉那样。虽然气动肌肉并不太好控制,但是他们的优势是体积更小一些。使用这种人造肌肉,新山龙马制造了名为“运动员”的两足机器人,在它的臀部和大腿使用了六块气动肌肉,以模拟人的臀大肌、股四头肌和大收肌——这些肌肉是跑步必须运动的部分。
“运动员”的小腿,是南非“刀锋战士”奥斯卡·皮斯托瑞斯所使用的那种假肢,而不是机械小腿和脚。同样,本着解决主要矛盾的思路,这种机器人也没有手臂和头,形状像是个怪模怪样的衣架。不过它真的能跑起来,只不过在平衡上还有些问题,总是跑一小段路就会摔倒。
对于它现在所能做到的来说,摔跟头不算是什么大问题。两足拟人机器人毕竟是一个很困难的领域,这样的突破足以让机器人控们欢欣鼓舞。没关系,让机器人跑一会儿吧,我们有的是时间。

0
推荐
 京公网安备 11010502034662号
京公网安备 11010502034662号 {kind=link}